درود
دوستان کسی تا حالا روی ربات پرنده کار کرده؟
اگر اطلاعاتی هم دارید لطفن به اشتراک بذارید
سپاس

 توجه: این یک موضوع قدیمی است که آخرین پست ارسالی آن مربوط به 4062 روز قبل است . لطفا فقط پاسخ ها ، سوالات و درخواست های 100 درصد مرتبط را به آن ارسال کنید و برای درخواست ها و سوالات جدید موضوع جدیدی را ایجاد کنید
توجه: این یک موضوع قدیمی است که آخرین پست ارسالی آن مربوط به 4062 روز قبل است . لطفا فقط پاسخ ها ، سوالات و درخواست های 100 درصد مرتبط را به آن ارسال کنید و برای درخواست ها و سوالات جدید موضوع جدیدی را ایجاد کنید


درود
دوستان کسی تا حالا روی ربات پرنده کار کرده؟
اگر اطلاعاتی هم دارید لطفن به اشتراک بذارید
سپاس

من هم مدتی هست در فکر ساختنش هستن
اما در مورد مشخصات موتورهای براش لس و قدرت و وزنی که میتونند جابجا کنند چیزی نمیدونم
اگر کسی اطلاعاتی داره بزاره
همینطور در باره ملخ یا پروانه اش
به آدرس های زیر یک نگاهی بینداز،اطلاعات خوبی دارند.نوشته اصلی توسط hamidam

انجمن تخصصی مدل آرسی
Persian RC - صفحه اصلی
طرز کار کواد ها بخش اول
اگه یه همچین چیزی بخوایم با امکانات داخل ایران بسازیم چقدر هزینه ش میشه؟ کسی می دونه؟
http://images.gizmag.com/gallery_lrg/mecamuav.png
http://images.gizmag.com/gallery_lrg/mecamuav-0.png
این چیزی که شما تصویرش رو گذاشتی ساختش مشکله
حتی اگه بتونی موتور های مناسب رو براش پیدا کنی اصلی ترین قسمتش یعنی همون اوتوپالیوت (پایدار کننده پرواز ) رو نمیتونی آماده پیدا کنی (با این اندازه )
اما درکل هزینه یه چنین ربات هایی بستگی به نوع ساختنش داره از دویست هزار تا چند میلیون میتونه براتون تموم بشه

سلام
برا ساخت ربات پرنده باید اول فکر بدنه باشین، که باید سبک و محکم باشه که معمولا از فیبر کربن و بازوهای کربنی استفاده میشه.
بعد از اون باید با توجه به میزان قدرتی که میخواین از پرنده داشته باشین باید موتور انتخاب کنین که مشخصات موتور مثل میزان وزنی که میتونه بلند کنه رو توی دیتاشیتش گفته و با توجه به جریانی که میکشه باید درایورهای موتور رو انتخاب کنین.
حالا بعد همه اینا باید با استفاده از سنسورهای ژیروسکوپ، شتاب سنج و قطب نما یه کنترل pid بنویسین تا پرنده تعادل خودش رو حفظ کنه و بتونه مانور بده، همچنین میتونین از ماژول های آماده ahrs و یا imu استفاده کنید که دیتا های مورد نیاز رو به صورت فیلتر شده در دسترس شما قرار میده.
در کل کار جالب و سرگرم کننده ایه، من حدود 10 تایی ساختم. 4 موتور و 6 موتور و 8 موتور.
یه نمونه 6 موتور رو توی وبلاگم (همین پایین) گذاشتم، کسی دوست داشت بره ببینه.
تبلیغ و بازاریابی نباشه، برا دوستانی میگم که دوست دارن این پرنده رو بسازن و برنامه نویسی و کنترل یاد ندارن...
ما یه سری ماژول وارداتی آماده داریم، کسی خواست یه پیام به من بزنه.
من چند وقت پیش واسه ساخت یکی از همین روباط ها شروع به کارکردم اما بنا به دلایلی نتونستم بسازم .
اما بد نیست یه توضیحاتی در مورد قسمت های اصلی این جور ربات ها بدم .
مهم ترین چیز تو این ربات ها برد پایدار کننده ی پرواز یا همون اتوپایلوتش هست که انواع مختلفی داره .از مدل هایی که کارشون فقط پایداری هستش تا مدل های که قطب نمای دیجیتال سنسور های شتاب وماژول gps سنسور های تشخیص ارتفاع و... بهش وص میشه واطلاعاتش رو به کامپیوتر ارسال می کنه وبعضی از این برد ها نر م افزار کامپیوتری مخصوص داره وحتی میشه براش ماموریت تعریف کرد
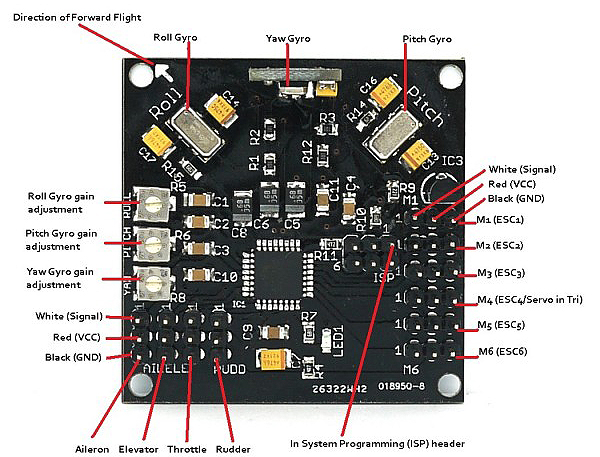
به نظر من ساده ترین اون ها برد KK MultiCopter Control Board هست این هم عکسش
این برد رو می تونید خودتون بسازید (شماتیک .pcb.وبرنامه های میکرو کنترلرش هم توسایتش هست)
وپیشرفته ترین وبا حال ترینشون هم برد Ardupilot Mega 2.5 این هم عکس ویه لینک برای توضیحاتش :
این هم یه سایت که درباره این برد توضیح داده :
www.iran-module.ir
نا گفته نمونه که این برد با این امکانات بی نظیرش قیمت بسار بالا یی هم داره تویه سایت ایرانی قیمت این برد رو با تمام اجزاش دو میلیون زده بود
این هم چنتا عکس از نر افزار کامپیوتری اون به اسم Mission Planner :
امیدوارم تا این جاش مورد توجهتون قرار گرفته باشه بقیه جزئیات هم باشه واسه قسمت بعدی.

من وبلاگتون رو دیدم
یه سوال برام پیش اومد بدنه این ربات هارو خودتون ساختید یا آماده خریدید ؟ (منظورم اون ربات شش موتوری که به صورت آماده عکسش رو گذاشتی )
ویرایش توسط mahdi1377 : 15-03-2013 در ساعت 02:13
طراحی و ساخت بدنه کار خودم.
دوستانی که خودشون دارن برنامه نویسی میکنن باید مقادیر خروجی جایرو و شتاب سنج رو با هم ترکیب کنن، البته بعد اینکه زوایای x و y رو بدست آوردن. و در واقع جایرو و شتابسنج همدیگه رو اصلاح میکنن.
برا این کار باید 99 درصد جایرو و 1 درصد شتاب سنج دخیل باشه.
زاویه بدست اومده از جایرو رو در 99 ضرب کنین و زاویه بدست اومده از شتاب سنج رو در 1 ضرب کنین و حاصل این دو رو با هم جمع کنین و در PIDتون بکار بگیرین.
البته این درصدها با توجه به سنسور و سرعت آپدیت و شرایط دیگه تغییر میکنه که باید به طور تجربی بهش برسین.
سلام
خیلی ممنون
فیلتر برای قرار دادن روی خروجی سنسور شتابسنج شما سراغ ندارید؟
کلا شتابسنج خیلی نویز داره!!!
سنسورهایی که خروجی آنالوگ دارن معمولا یکم نویز داره اما اونقدری نیست که تداخل زیادی ایجاد کنه، بیشتر خروجی جایرو نا پایداره، به طوری که اگه حتی جابجا نشه خروجیش شروع به تغییر میکنه، به اصطلاح میگن دریفت (Drift) داره و به همین خاطره که با شتاب سنج باید ترکیب بشه.
سنسور MPU6050 دارای سه محور جایرو و سه محور شتاب سنج با خروجی I2C گزینه مناسبی برا انتخاب دوستانی که میخوان خروجی بدون نویز داشته باشن.
اگر قصد دارین قطبنما هم استفاده کنین میتونین از سنسور HMC5883L استفاده کنین که این هم خروجی I2C داره و از نظر سخت افزاری میتونه با MPU6050 ترکیب بشه و از اون دستور بگیره.
 مجوز های ارسال و ویرایش
مجوز های ارسال و ویرایش

 پاسخ با نقل قول
پاسخ با نقل قول