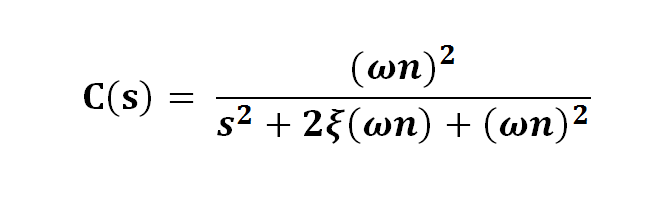
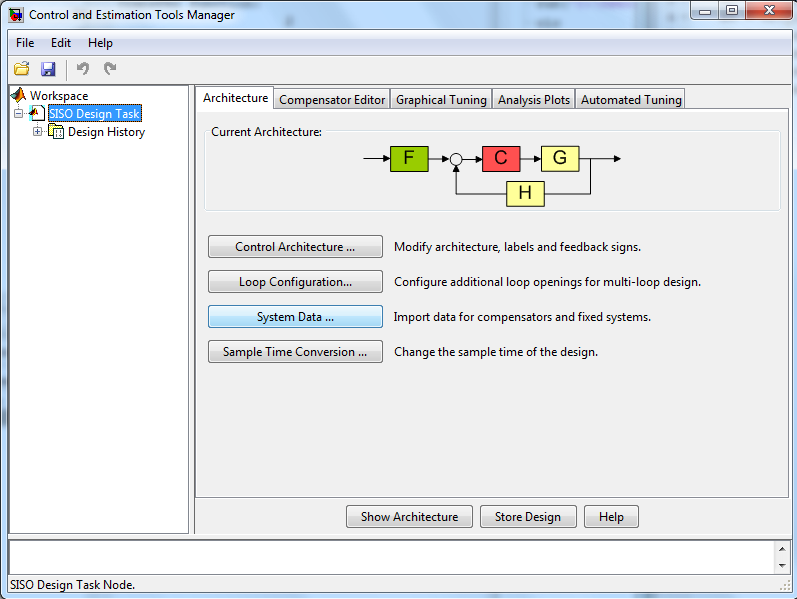
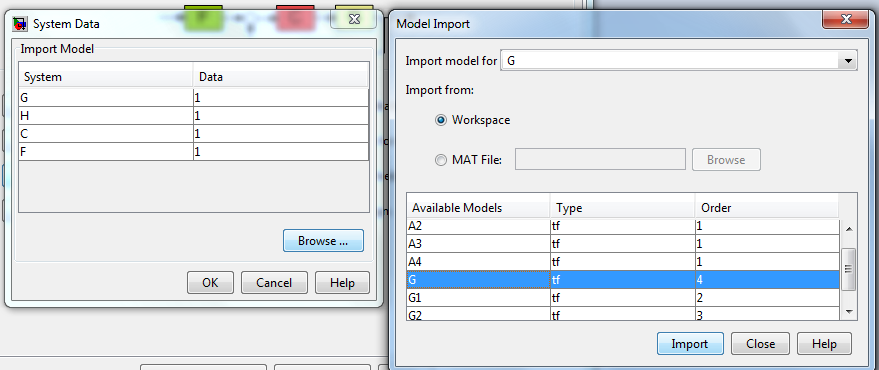
این برنامه برای تعریف تابع تبدیل سیستم
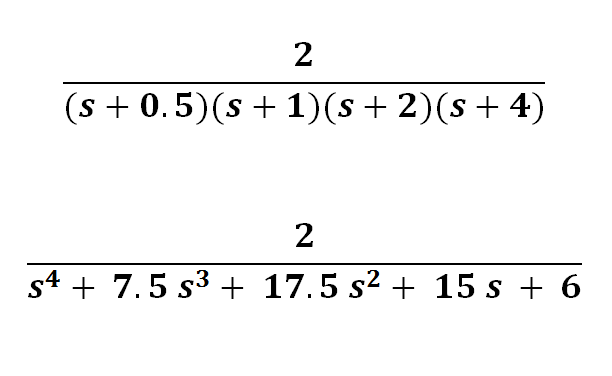
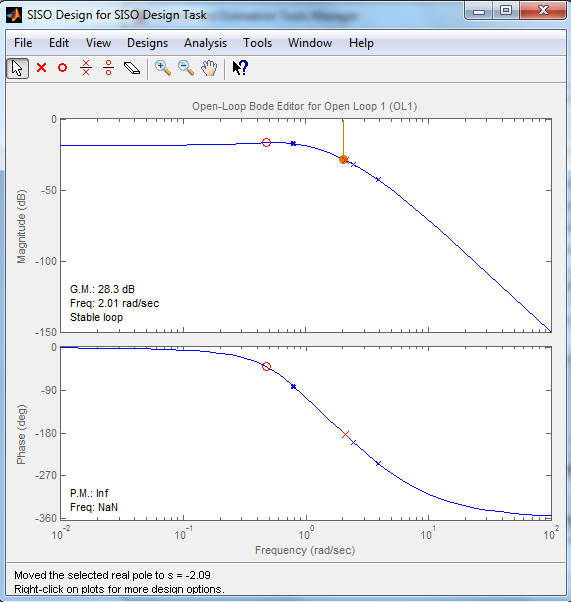
تعداد قطب ها 4 تا هست (مخرج) که درجه سیستم رو 4 میکنه
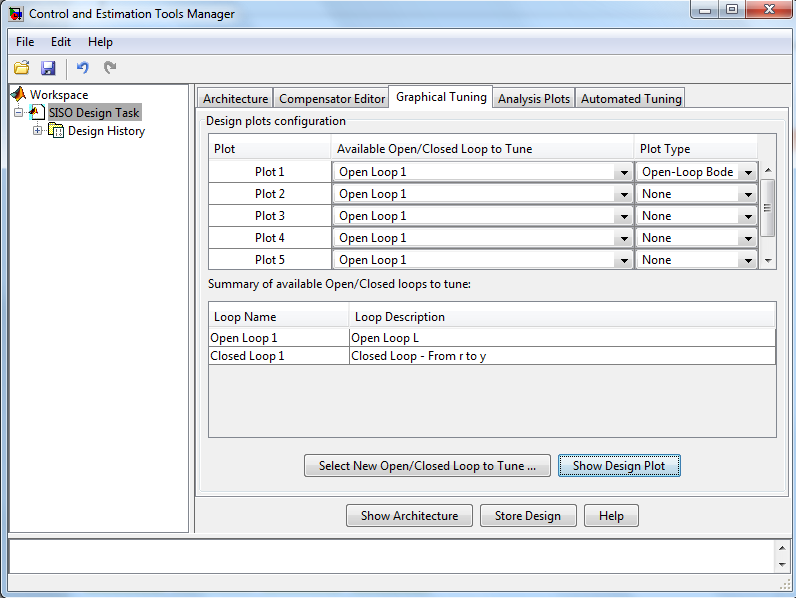
اینم از خود تابعکد:A1 = tf([1],[1 0.5]); A2 = tf([1],[1 1]); A3 = tf([2],[1 2]); A4 = tf([1],[1 4]); G1 = series (A1 , A2); G2 = series (G1 , A3); G3 = series (G2 , A4); G = feedback(G3,1)

 پاسخ با نقل قول
پاسخ با نقل قول



 افسرده شدم
افسرده شدم

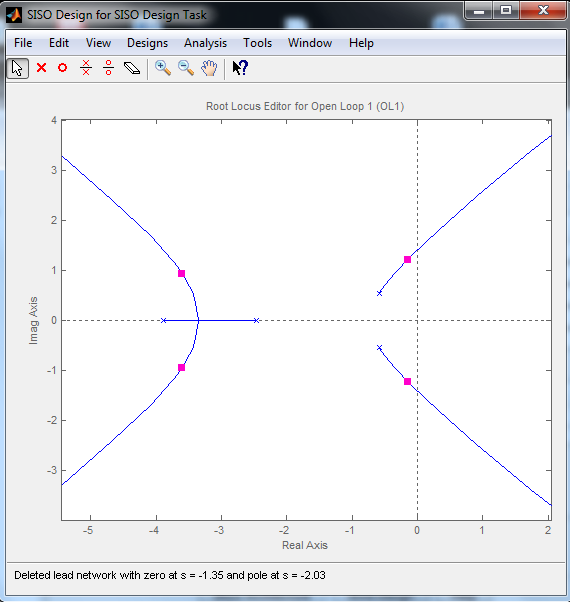
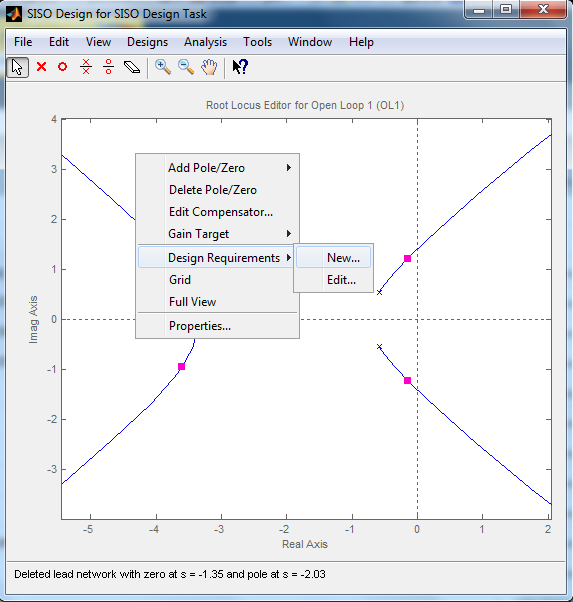
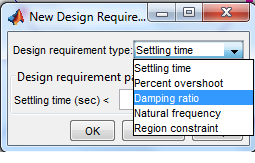
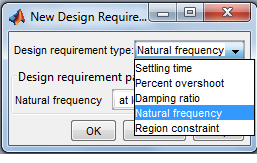
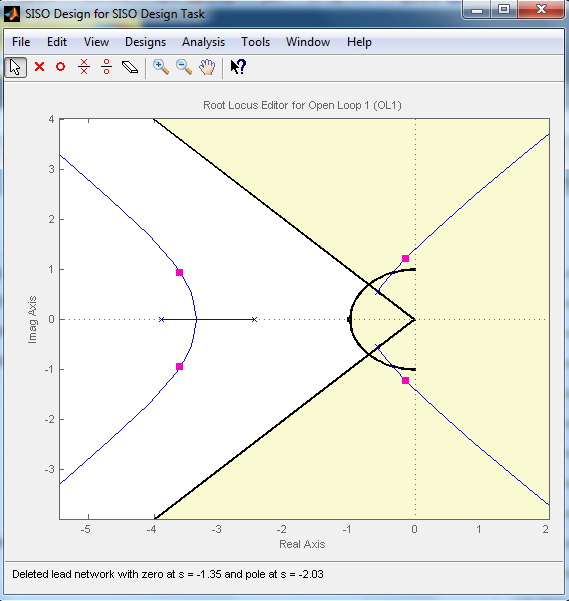
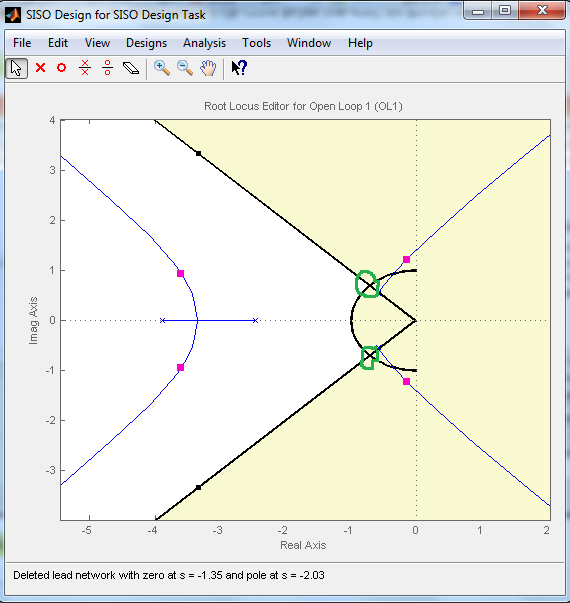
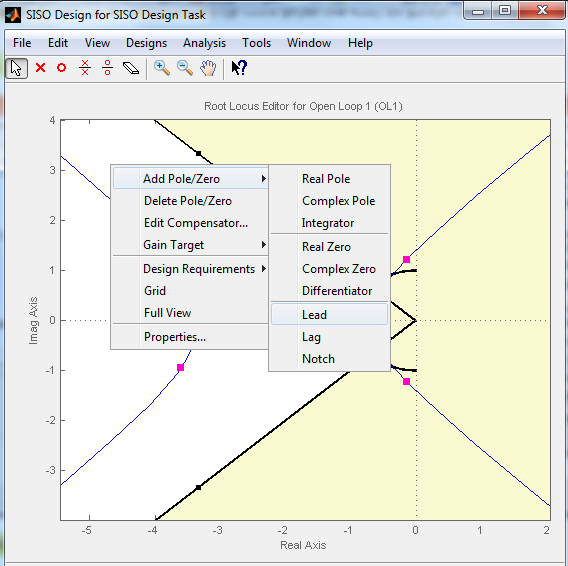
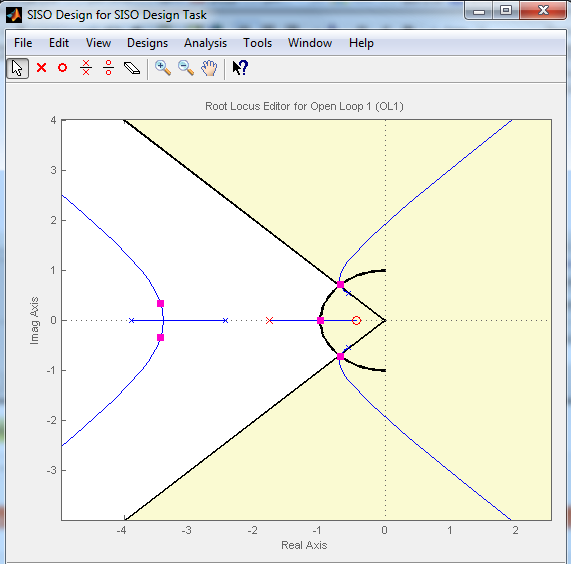






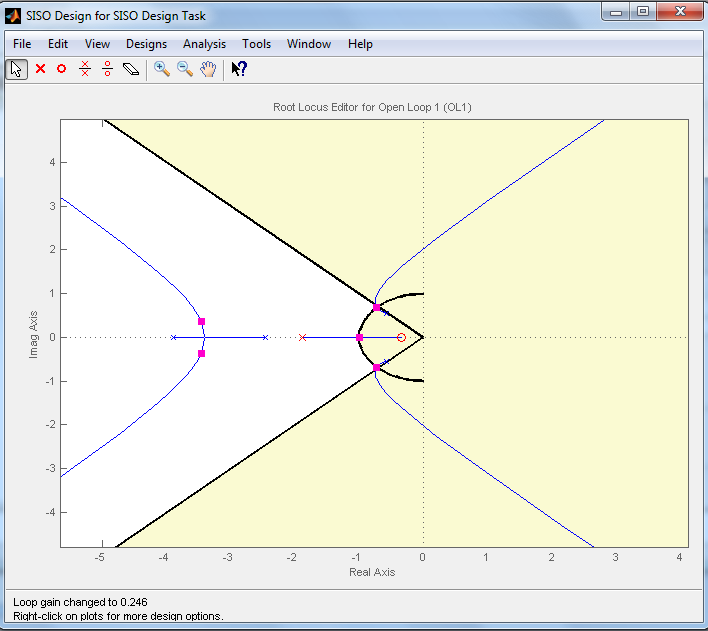
 )اما مراحل بدست اوردن این سه تا قطب اینه
)اما مراحل بدست اوردن این سه تا قطب اینه