




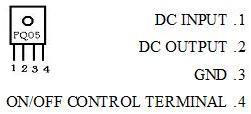
تفاوت رگولاتورهای سری PQxx با رگولاتورهای سری 78xx
تفاوت رگولاتورهای سری PQxx با رگولاتورهای سری 78xx
به عنوان مثال تفاوت رگولاتور PQ05 با رگولاتور 7805 به صورت زیر خواهد بود .
همان طور که می دانیم برای راه اندازی 7805 نیاز به ولتاژ ورودی حداقل8 ولت دارریم اما در PQ05 ولتاژ ورودی می تواند 5.7V ولت باشد
این ولتاژ کمتر سبب می شود که بتوانیم جریان بیشتری از رگولاتور دریافت کنیم.حال که مشخص شد چرا از این رگولاتور استفاده کردیم در بعضی از قسمت های مدار برای نویزگیری از یک خازن استفاده شده که نویز محیط را کامل بگیرد و نویزهای احتمالی در این قسمت از بین برود .
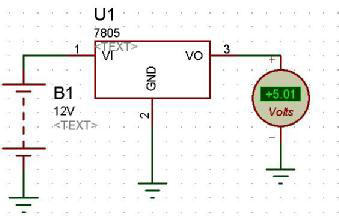
فرض کنید در شکل زیر جریان خروجی 2 آمپر می باشد. میدانیم حداقل ولتاژ ورودی برای این رگولاتور 8 ولت است. پس داریم:
Pi=(Vi)(Ii)=8vx2A=16W
Po=(Vo)(Io)=5Vx2A=10w
Pd=Pi-Po=16w-10w=6W
مشاهده می کنید که 6 وات توان در همان لحظه اول به گرما تبدیل می شود و تلفات زیادی داریم اما در آی سی PQ05 حداقل ولتاژ 5.7 ولت می باشد پس داریم:
Pi=(Vi)(Ii)=5.7vx2A=11.4W
Po=(Vo)(Io)=5Vx2A=10W
Pd=Pi-Po=11.4w-10w=1.4W
همان طور که مشاهده می کنید توان تلف شده کمتر است.
به این نکته توجه کنید چون در رگولاتور ها توان ثابت است هر چقدر ولتاژ کمتری به ورودی رگولاتور اعمال کنید جریان بیشتری را دریافت خواهید کرد .
برای مثال:
طی تجربیات عملی که بدست آوردیم توان رگولاتور 14 - 13.5 وات می باشد .
یعنی اگر ولتاژ ورودی رگولاتور را 12 ولت در نظر بگیریم :
Pi = Vi * Ii => 14W = 12V * Ii => Ii =14W/12V =1.16A
حداکثر جریانی که می تواند رگولاتور تامین کند 1.16A می باشد .
حالا در نظر بگیرید که ولتاژ ورودی را به 9 ولت کاهش دهیم خواهیم داشت:
Pi = Vi * Ii => 14W = 9V * Ii => Ii =14W/12V =1.5A
مشاهده کردید که در حال حاضر بیشترین جریانی که می توان از رگولاتور گرفت به 1.5A افزایش یافت .
به این نکته توجه کنید که نمی توان به راحتی ولتاژ ورودی یک رگولاتور را کم کرد و باید به برگه های اطلاعاتی آن مراجعه کرد یعنی حداقل ولتاژ ورودی برای آی سی 7805 8 ولت و برای PQ05 میزان آن 5.7 ولت می باشد پس دقت کنید.

 پاسخ با نقل قول
پاسخ با نقل قول















 خواهد بود كه
خواهد بود كه و
و نفوذ پذيري مغناطيسي نسبي ماده مي باشد.
نفوذ پذيري مغناطيسي نسبي ماده مي باشد.

