



روبات تعقيب كننده نور
این یه روبات تعقیب کننده نور است که توسط یک میکروکنترلر AVR كنترل مي شود قطعات استفاده شده در آن هم خيلي پيچيده نيست بنابراين اگر قسمتي از آن را پيدا نكرديد مي توانيد براحتي آن را با قطعات ديگر تعويض كنيد ايده هاي استفاده شده در آن نيز جالبه براي ايده گرفتن هم مي توانيد آنرا ببينيد.
مكانيك سيستم :
در ابتدا باید موتور های مناسبی را برای ربات خود انتخاب کنید. این موتور ها باید دارای گیربکس باشند چون معمولا خروجی موتور ها دارای سرعت زیاد و قدرت کم است که با گیربکس مناسب می توانید آنرا به قدرت و سرعت مناسب تبدیل کنید دو نوع موتور را در شکل ها می بینید ولتاژ کاری موتور ها نیز باید به گونه ای انتخاب شود که بتواند با باتری کار کند که معمولا ولتاژ ۳ - ۵/۴ ولت پیشنهاد می شود جریان مصرفی موتور هم باید تقریبا کم باشد تا بتوان از باتری های کو چکتر و مدار های کنترل معمولی تری استفاده کنیم در این سیستم از آی سی l293d استفاده شده که می تواند ۰.۵ آمپر را تحمل کند پس باید موتور شما جریان کمتری را مصرف کند البته نگران نباشید اگر این آی سی را هم پیدا نکردید می توانید از ترانزیستور های معمولی به جای آن استفاده کنید.
برای این ربات به دو موتور مشابه نیاز دارید و برای گیربکس و تایر های آن می توانید از ماشین های اسباب بازی استفاده کنید و تایر ها آن و حتی گیربکس آنها را باز کنید
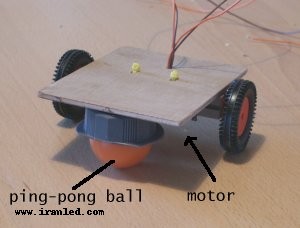
برای چرخ سوم نیز می توانید از یک توپ پینگ پونگ استفاده کنید این باعث می شود ربات شما به راحتی به هر طرفی بچرخد البته باید مراقب باشید وزن زیادی را به این توپ وارد نکنید زیرا باعث گیر کردن آن می شود به شکل نگاه کنید.
موتور ها را بهتره که در وسط سیستم قرار بدین تا بیشتر بار روی آنها قرار گیرد براي نگه دارنده هم مي توانيد از يك تخته جوبي به ابعاد 9 در 12 سانتي متر استفاده كنيد البته كمي از وزن را بايد روي توپ قرار دهيد تا سيستم پايدار بماند.
برای نگه دارنده توپ پینگ پونگ هم می توانید از در های قوطی های معمولی استفاده کنید ولی باید دقت کافی رو بکنید تا به اندازه توپ شما باشد
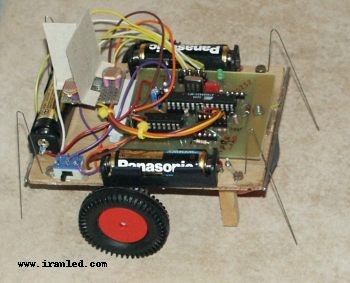
برای تغذیه دستگاه از سه باتری سایز AAA استفاده شده براي جا گذاري باتري ها هم دقت كنيد تا نيروي زيادي را به توپ پينگ پونگ وارد نكنيد مي توانيد از نقشه زير براي قرار گرفتن آن استفاده كنيد بد نيست كه از يك كليد نيز براي قطع و وصل كردن آن استفاده كنيد.
حسگر ها :
در اين ربات از دونوع سنسور استفاده شده
سنسور هاي تماسي : كه بر خورد ربات با ديوار را تشخيص مي دهد
سنسور هاي نوري : كه براي تشخيص منبع نور استفاده مي شود
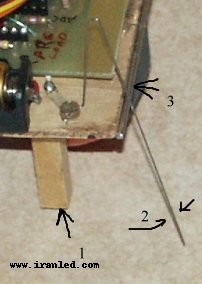
سنسورهاي تماسي در واقع يك نوع كليد معمولي تشكيل شده از يك سيم خم شده استيل است كه مي توانيد آنرا در شكل زير مشاهده كنيد.
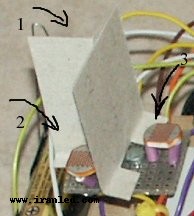
۴ عدد از این سنسور در اطراف ربات قرار دارد تا در صورت بر خورد با مانع آنرا تشخیص دهد این سنسور ها با پیچ به صفحه چوبی محکم شده اند و هنگام بر خورد با مانع به سیم کناری صفحه بر خورد می کنند (شکل زیر را ببینید با شماره ۳ مشخص شده) و برای اینکه هنگامی که توپ پینگ پونگ در جای خود قرار ندارد سنسور ها خراب نشوند از یک پایه چوبی که حدود ۰.۵ سانتی متر از سطح زمین پایین تر است (هنگامی که توپ پینگ پونگ وجود دارد) استفاده شده خود سنسور ها هم باید ۷ میلی متر از سطح زمین فاصله داشته باشند.
سنسور های نوری سه عدد فوتوسل است که با دو قطعه مقوا از هم جدا شده اند تا مانع از تابیدن نوری شوند که از طرف دیگر می آید تنها هنگامی نور به هر سه به یک اندازه می تابد که نور دقیقا بالای سر آنها باشد. با مقایسه نور این سه سنسور ربات می تواند تشخیص دهد که به کدام سمت حرکت کند. شما می توانید این سنسور ها را روی یک فیبر سوراخ دار لحیم کرده و آنرا بر روی رباتتان پیچ کنید.
نقشه مدار :
از آی سی AT90S4433 به عنوان کنترل کننده این سیستم استفاده شده ولی شما می توانید آنرا با هر میکروی دیگری جایگزین کنید. برای راه اندازی موتور ها نیز از آی سی L293D استفاده شده که می توانی آنرا با درایور های دیگر یا ترانزیستور جایگزین کنید فقط دید های معکوس را که برای ولتاژ معکوس سلف های موتور استفاده می شود را فراموش نکنید (در این آی سی وجود دارد) و فراموش نکنید که به علت استفاده از دو درایور برای یک موتور می توانیم آنرا برعکس هم بچر خانیم (ولتاژ پایه های آنرا معکوس کنیم)
فراموش نکنید که هر کدام از خروجی ها می تواند مثبت یا منفی شود (به میزان کافی جریان بدهد یا بکشد). خروجی فوتوسل ها نیز مستقیم به ورودی های آنالوگ سیستم وصل شده اند تا بتوان میزان شدت نور آنهارا اندازه گرفت در زیر نقشه مدار را مشاهده می کنید.
روبات ما آماده است ولی اگر بتوانیم خروجی های آنرا نیز مشاهده کنیم بهتر می توانیم عیبهای آنرا پیدا کنیم شما می توانید خروچی را توسط رابط RS232 به كامپيوتر وصل كنيد البته نياز نيست دايم به كامپيوتر وصل باشد بعد از اتمام مراحل ساخت مي توانيد آنرا جدا كنيد براي اتصال نيز به يك برد جانبي نياز داريد تا ولتاژ ها را با هم ساز گار كند پس اين برد زير را نيز بسازيد و به سيستم خود اضافه كنيد البته اگر مبدل TTL به RS232 داريد مي توانيد از آن نيز استفاده كنيد يا اگر نداريد مي توانيد از اين برد به عنوان يك مبدل خوب استفاده كنيد حتما براي پروژه هاي بعدي نيز به آن نياز پيدا مي كنيد.
براي سيم كشي ها هم مي توانيد از عكس زير استفاده كنيد .
اين مقاله تر جمه شده http://www.linuxfocus.org/English/July2003/article297.shtml از سايت www.linuxfocus.org مي باشد براي اطلاعات بشتر مي توانيد به اين سايت مراجعه كنيد
منبع


 پاسخ با نقل قول
پاسخ با نقل قول