Ъ©Ш§Шұ ШЁШ§ ЩҫЩҲШұШӘ USB ШҜШұ ШҜШіШӘЩҮ Device ШҜШұ Ш®ЩҲШҙЩҮ ЫҢ CDC ШЁШ§ ШҜШұШ§ЫҢЩҲ VCP
ЩҫЩҲШұШӘ USB Ш®ЩҲШҜ ШҜШ§ШұШ§ЫҢ ЪҶЩҶШҜ Ш®ЩҲШҙЩҮ Ш§ШіШӘ. Щ…ЩҲШіШҢ Ъ©ЫҢШЁШұШҜШҢ Щ…ЩҲШҜЩ…ШҢ ЩҫШұЫҢЩҶШӘШұШҢ ЪҜЫҢЩ… ЩҫШҜ ЩҲ ... Ш§ШІ Ш®ЩҲШҙЩҮ ЩҮШ§ЫҢ ЫҢЪ©ШіШ§ЩҶЫҢ Ш§ШіШӘЩҒШ§ШҜЩҮ ЩҶЩ…ЫҢ Ъ©ЩҶЩҶШҜ. 256 Ш®ЩҲШҙЩҮ ЩҲШ¬ЩҲШҜ ШҜШ§ШұШҜ! ШҜШұ Ш§ШҜШ§Щ…ЩҮ ЪҶЩҶШҜ ШӘШ§Шҙ Ш°Ъ©Шұ ШҙШҜЩҮ Ш§ШіШӘ
Ъ©ШҜ:
ADC ==> Audio Device Class
CDC ==> Communications Device Class
HID ==> Human Interface Device
MSC ==> Mass storage Class
PDC ==> Printer Device Class
PHD ==> Personal Healthcare device
PID ==> Physical Interface Device
SID ==> Still Imaging Device
VDC ==> Video Device Class
ЩҮШұ ШҜШіШӘЪҜШ§ЩҮ USB Ш¬ШІ ЫҢЪ©ЫҢ Ш§ШІ 3 ШҜШіШӘЩҮ ШІЫҢШұ Ш§ШіШӘ
1- Ш§ШЁШІШ§Шұ Device
2- Щ…ЩҮЩ…Ш§ЩҶ Host
3- ЩҮЩ…ШІЩ…Ш§ЩҶ Ш§ШЁШІШ§Шұ ЩҲ Щ…ЩҮЩ…Ш§ЩҶ Dual
ШҜЩҲ ШұШ§ЩҮ ШЁШұШ§ЫҢ Ш§ШұШӘШЁШ§Ш·ЫҢ ШЁШұШ§ЫҢ USB ЩҲШ¬ЩҲШҜ ШҜШ§ШұШҜ
1- Ш§ШұШӘШЁШ§Ш· Щ…ШіШӘЩӮЫҢЩ… ЫҢЪ© ШЁЩҮ ЫҢЪ© (ЫҢЪ©ЫҢ Щ…ЩҮЩ…Ш§ЩҶ ЩҲ ШҜЫҢЪҜШұЫҢ Ш§ШЁШІШ§Шұ)
2- Ш§ШұШӘШЁШ§Ш· ЪҶЩҶШҜ ШЁЩҮ ЫҢЪ© ( ЫҢЪ© Щ…ЩҮЩ…Ш§ЩҶ ЩҲ ШЁЩӮЫҢЩҮ ШЁШ§ ЩҮШ§ШЁ ШЁЩҮ Щ…ЩҮЩ…Ш§ЩҶ ЩҲШөЩ„ Щ…ЫҢ ШҙЩҲЩҶШҜ)
ЩҮЩ…Ш§ЩҶ Ш·ЩҲШұ Ъ©ЩҮ ШҜЫҢШҜЩҮ Щ…ЫҢ ШҙЩҲШҜ ШЁЩҮ Ш№Щ„ШӘ ШӘЩҶЩҲШ№ Ш®ЩҲШҙЩҮ ЩҮШ§ ШҢ ШҜШіШӘЩҮ ЩҮШ§ ЩҲ ШұШ§ЩҮ Ш§ШұШӘШЁШ§Ш·ЫҢ ЩҶЩҲШҙШӘЩҶ ШЁШұЩҶШ§Щ…ЩҮ Ъ©Ш§Шұ USB Ъ©Ш§Шұ ЩҮШұ Ъ©Ші ЩҶЫҢШіШӘ. ЩҮЩ…ЪҶЩҶЫҢЩҶ Ш№Щ„Ш§ЩҲЩҮ ШЁШұ ЩҶЩҲШҙШӘЩҶ ШЁШұЩҶШ§Щ…ЩҮ Щ…ЫҢЪ©ШұЩҲ ШҢ Щ„Ш§ШІЩ… Ш§ШіШӘ ШЁШұШ§ЫҢ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ ЩҶЫҢШІ ШҜШұШ§ЫҢЩҲШұ ЩҶЩҲШҙШӘ!!!
Щ…ШІЫҢШӘ ШІШЁШ§ЩҶ ШіЫҢ ЩҫЩ„Ш§Ші ЩҫЩ„Щ„Ш§Ші ЩҶШіШЁШӘ ШЁЩҮ Ш§ШіЩ…ШЁЩ„ЫҢ ЩҲШ¬ЩҲШҜ Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ЩҮШ§ШҢ Ъ©Щ„Ш§Ші ЩҮШ§ ЩҲ ШӘЩҲШ§ШЁШ№ Ш§ШіШӘ. ЩҫШі ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ Щ…ЩҶШ§ШіШЁ Щ…ШҙЪ©Щ„ ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ Ъ©Ш§Щ…Щ„Ш§ ШӯЩ„ Щ…ЫҢ ШҙЩҲШҜ.
ШЁЩҮ Ш№Щ„ШӘ ШӘЩҶЩҲШ№ ШұЩҲШҙ ЩҮШ§ ЩҲ ... Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ Ш§ШіШӘШ§ЩҶШҜШ§ШұШҜЫҢ ЩҲШ¬ЩҲШҜ ЩҶШҜШ§ШұШҜ.
ЩҮШұ ЪҶЩҶШҜ ЩҶШұЩ… Ш§ЩҒШІШ§Шұ CooCox CoIDE Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШЁШұШ§ЫҢ Ъ©Ш§Шұ ШЁШ§ USB ЩӮШұШ§Шұ ШҜШ§ШҜЩҮШҢ Ш§Щ…Ш§ Ъ©Ш§Шұ ЩҶЩ…ЫҢ Ъ©ЩҶШҜ ЩҲ Щ…ШҙЪ©Щ„Ш§ШӘ Ъ©ШҜ ЩҶЩҲЫҢШіЫҢ ШҜШ§ШұШҜ!
ЪҶЩҮШ§Шұ Щ…Ш§ЩҮ ЩҫЫҢШҙ Ъ©Ш§ШұШЁШұ xenovacivus ШҜШұ ЫҢЪ©ЫҢ Ш§ШІ ШіШ§ЫҢШӘ ЩҮШ§ ! Ъ©ШҜ Ш§ШөЩ„Ш§Шӯ ШҙШҜЩҮ Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ Ъ©Ш§Шұ ШЁШ§ ЩҫЩҲШұШӘ USB ШҜШұ ШҜШіШӘЩҮ Device ШҜШұ Ш®ЩҲШҙЩҮ ЫҢ CDC ШЁШ§ ШҜШұШ§ЫҢЩҲ VCP ШұШ§ Щ…ЩҶШӘШҙШұ Ъ©ШұШҜ! Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ШұШ§ Щ…ЫҢ ШӘЩҲШ§ЩҶЫҢШҜ Ш§ШІ Щ„ЫҢЩҶЪ© ШІЫҢШұ ШҜШ§ЩҶЩ„ЩҲШҜ Ъ©ЩҶЫҢШҜ.
302 Found
ШҜШұШ§ЫҢЩҲШұ ШўЩҶ ШұШ§ ЩҮЩ… Щ…ЫҢ ШӘЩҲШ§ЩҶЫҢШҜ Ш§ШІ ШіШ§ЫҢШӘ ST ШҜШ§ЩҶЩ„ЩҲШҜ Ъ©ЩҶЫҢШҜ:
Ъ©ШҜ:
STSW-STM32102
STM32 Virtual COM Port Driver
http://www.st.com/web/en/catalog/tools/PF257938
Ш§ШЁШӘШҜШ§ ШҜШұШ§ЫҢЩҲШұ ШұШ§ ЩҶШөШЁ Ъ©ЩҶЫҢШҜ ЩҲ ШіЩҫШі ШұШ§ЫҢШ§ЩҶЩҮ ЫҢШӘШ§ЩҶ ШұШ§ ШұЫҢШіШӘШ§ШұШӘ ЩҶЩ…Ш§ЫҢШҜ
ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ Щ…ЫҢЪ©ШұЩҲЪ©ЩҶШӘШұЩ„Шұ Ш¬ЩҮШӘ Ъ©Ш§Шұ ЩҫЩҲШұШӘ USB ШҜШұ ШҜШіШӘЩҮ Device ШҜШұ Ш®ЩҲШҙЩҮ ЫҢ CDC ШЁШ§ ШҜШұШ§ЫҢЩҲ VCP
Ш§Ъ©ЩҶЩҲЩҶ ЫҢЪ© ЩҫШұЩҲЪҳЩҮ Ш¬ШҜЫҢШҜ ШЁШіШ§ШІЫҢШҜ ШҢ ШҜШұ Щ…Ш®ШІЩҶ ШӘЫҢЪ© ЩҮШ§ЫҢ CooCox CoIDE ШӘЫҢЪ© ЩҮШ§ЫҢ GPIO - EXTI - USART - MISC ШұШ§ ЩҒШ№Ш§Щ„ Ъ©ЩҶЫҢШҜ.
Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ШұШ§ ШҜШұ ЩҫЩҲШҙЩҮ ЫҢ ЩҫШұЩҲЪҳЩҮ Ъ©ЩҫЫҢ ЩҶЩ…Ш§ЫҢЫҢШҜ. ШіЩҫШі ШўЩҶ ШұШ§ ШЁЩҮ ЩҫШұЩҲЪҳЩҮ Ш®ЩҲШҜ ШЁЫҢШ§ЩҒШІШ§ЫҢЫҢШҜ.
ЩӮШЁЩ„ ШӘШ§ШЁШ№ Ш§ШөЩ„ЫҢ (main) ШҜШіШӘЩҲШұШ§ШӘ ШІЫҢШұ ШұШ§ ЩҲШ§ШұШҜ Ъ©ЩҶЫҢШҜ.
Ъ©ШҜ:
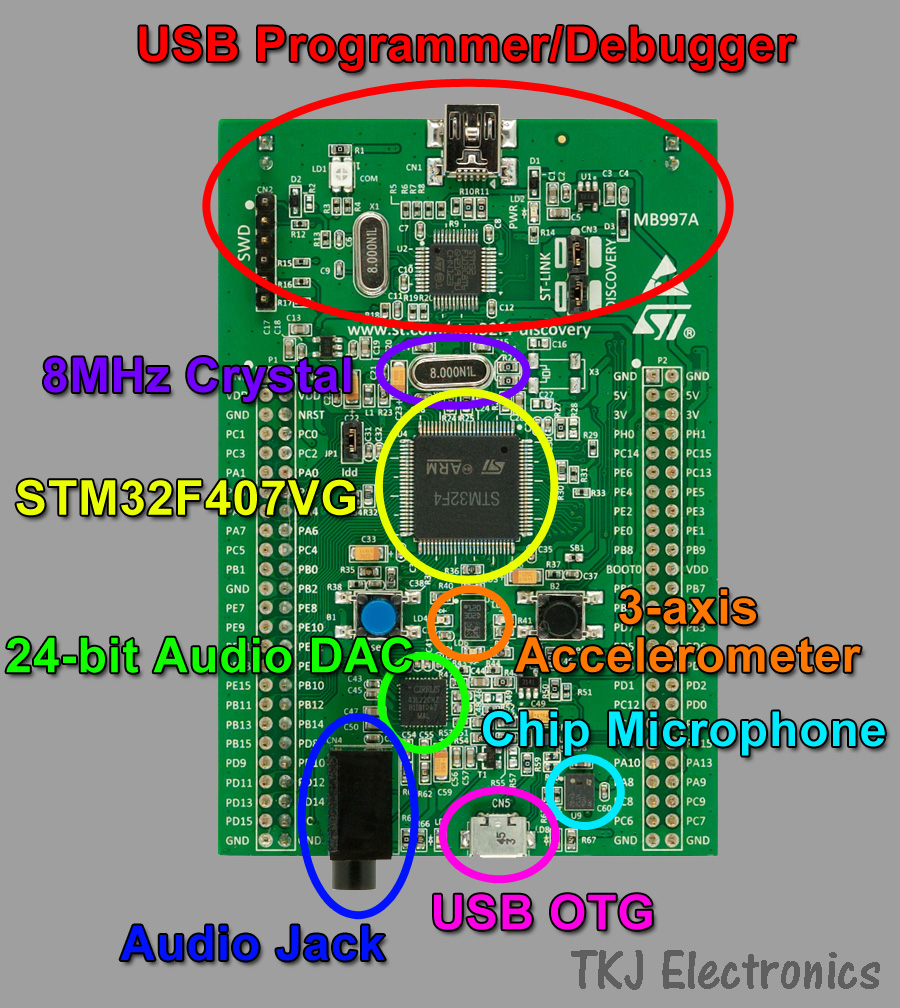
#define HSE_VALUE ((uint32_t)8000000) // STM32 discovery uses a 8Mhz external crystal
#include "stm32f4xx.h"
#include "stm32f4xx_conf.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_exti.h"
#include "usbd_cdc_core.h"
#include "usbd_usr.h"
#include "usbd_desc.h"
#include "usbd_cdc_vcp.h"
#include "usb_dcd_int.h"
//The USB data must be 4 byte aligned if DMA is enabled. This macro handles the alignment, if necessary.
__ALIGN_BEGIN USB_OTG_CORE_HANDLE USB_OTG_dev __ALIGN_END;
// The conditional "extern" ensures the weak declarations from startup_stm32f4xx.c are overridden.
#ifdef __cplusplus
extern "C" {
#endif
void OTG_FS_IRQHandler(void)
{
USBD_OTG_ISR_Handler (&USB_OTG_dev);
}
void OTG_FS_WKUP_IRQHandler(void)
{
if(USB_OTG_dev.cfg.low_power)
{
*(uint32_t *)(0xE000ED10) &= 0xFFFFFFF9 ;
SystemInit();
USB_OTG_UngateClock(&USB_OTG_dev);
}
EXTI_ClearITPendingBit(EXTI_Line18);
}
#ifdef __cplusplus
}
#endif
ШҜШіШӘЩҲШұ ШІЫҢШұ ШЁЩҮ Щ…ЫҢЪ©ШұЩҲЪ©ЩҶШӘШұЩ„Шұ Щ…ЫҢ ЪҜЩҲЫҢШҜ Ъ©ЩҮ Ъ©ШұЫҢШіШӘШ§Щ„ Ш®Ш§ШұШ¬ЫҢ Ш§ШӘ 8 Щ…ЪҜШ§ ЩҮШұШӘШІ Ш§ШіШӘ. Ш§ЫҢЩҶ ШҜШіШӘЩҲШұ ШЁШұШ§ЫҢ Ш§ЩҒШІШ§ЫҢШҙ ШҜЩӮШӘ (ШІЩ…Ш§ЩҶЫҢ) ШЁШұЩҶШ§Щ…ЩҮ Ш§Ш¶Ш§ЩҒЩҮ Ъ©ШұШҜЫҢЩ…. Ш§ШІ Ш§ЫҢЩҶ ШЁЩҮ ШЁШ№ШҜ ШҜШұ ШӘЩ…Ш§Щ…ЫҢ ШЁШұЩҶШ§Щ…ЩҮ ЩҮШ§ЫҢ Ъ©ЩҮ Щ…ЫҢ ЩҶЩҲЫҢШіЫҢШҜ Ш§ШІ Ш§ЫҢЩҶ ШҜШіШӘЩҲШұ Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ЩҶЫҢШҜ.
Ъ©ШҜ:
#define HSE_VALUE ((uint32_t)8000000)
Ъ©ШӘШ§ШЁ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШІЫҢШұ ШЁЩҮ ШӘШұШӘЫҢШЁ ШҙЩҶШ§ШіШ§ЫҢЫҢ Щ…ЫҢЪ©ШұЩҲШҢ ЩҫШұЩҲШӘ ЩҮШ§ЫҢ ЩҲШұЩҲШҜЫҢ Ш®ШұЩҲШ¬ЫҢШҢ Ъ©Щ„Ш§Ъ© ЩҲ ЩҲЩӮЩҒЩҮ (Ш§ЫҢЩҶШӘШұШ§ЩҫШӘ) Ш§ШіШӘ.
Ъ©ШҜ:
#include "stm32f4xx.h"
#include "stm32f4xx_conf.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_exti.h"
Ъ©ШӘШ§ШЁШ®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШІЫҢШұ ЩҮЩ…Ш§ЩҶ Ъ©ШӘШ§ШЁ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ЩҫЩҲШұШӘ USB ЩҮШіШӘЩҶШҜ.
Ъ©ШҜ:
#include "usbd_cdc_core.h"
#include "usbd_usr.h"
#include "usbd_desc.h"
#include "usbd_cdc_vcp.h"
#include "usb_dcd_int.h"
ЪҶЩҲЩҶ ШҙЩ…Ш§ Щ…ШЁШӘШҜЫҢ ЩҮШіШӘЫҢШҜ ШЁЩҮШӘШұ Ш§ШіШӘ ЪҶЩҶШҜ Ш®Ш·ЫҢ Ъ©ЩҮ ШЁШ№ШҜ Ш§ШІ ШіШұШ§Щ…ШҜ ЩҮШ§ ШўЩ…ШҜЩҮ Ш§ШіШӘ ШұШ§ ШЁШҜЩҲЩҶ Ш§ЫҢЩҶ Ъ©ЩҮ ШЁШҜШ§ЩҶЫҢШҜ ЪҶЩҮ Ъ©Ш§Шұ Щ…ЫҢ Ъ©ЩҶЩҶШҜ Ъ©ЩҫЫҢ Ъ©ЩҶЫҢШҜ. ЩҲЩӮШӘЫҢ Ъ©ЩҮ Ъ©Ш§Щ…Щ„Ш§ ШӯШұЩҒЩҮ Ш§ЫҢ ШҙШҜЫҢШҜ ШЁШ№ШҜШ§ ШЁЩҮ ШіШұШ§ШәШҙШ§ЩҶ ШЁЫҢШ§ЫҢШҜ.
SystemInit
ШӘШ§ШЁШ№ ШІЫҢШұ Ш¬ЩҮШӘ ЩҒШ№Ш§Щ„ ШіШ§ШІЫҢ Ъ©Щ„Ш§Ъ© ШіЫҢШіШӘЩ… Ш§ШіШӘ ЩҲ Ъ©Ш§ШұШЁШұШҜ ШўЩҶ Щ…ЩҶШӯШөШұ ШЁЩҮ USB ЩҶЩ…ЫҢ ШҙЩҲШҜ
Ш§ШІ Ш§ЫҢЩҶ ШЁЩҮ ШЁШ№ШҜ Ш§ЫҢЩҶ ШӘШ§ЫҢШ№ ШұШ§ ШҜШұ ШӘЩ…Ш§Щ…ЫҢ ШЁШұЩҶШ§Щ…ЩҮ ЩҮШ§ЫҢ Ъ©ЩҮ Щ…ЫҢ ЩҶЩҲЫҢШіЫҢШҜ Ш§Ш¶Ш§ЩҒЩҮ Ъ©ЩҶЫҢШҜ. (ШҜШұ Ш§ЫҢШӘШҜШ§ЫҢ ШӘШ§ШЁШ№ Ш§ШөЩ„ЫҢ)
USBD_Init
ШӘШ§ШЁШ№ ШІЫҢШұ ШЁШұЩҶШ§Щ…ЩҮ Щ…ЫҢ ЩҒЩҮЩ…Ш§ЩҶШҜ Ъ©ЩҮ ШҙЩ…Ш§ Щ…ЫҢ Ш®ЩҲШ§ЩҮШҜ Ш§ШІ ШЁЫҢЩҶ Ъ©Щ„ЫҢЩҮ ШұЩҲШҙ ЩҮШ§ЫҢ Щ…ЩҲШ¬ЩҲШҜ ШҜШұ USB ЩҒЩӮШ· ЩҲ ЩҒЩӮШ· Ш§ШІ ШҜШіШӘЩҮ Device ШҜШұ Ш®ЩҲШҙЩҮ ЫҢ CDC ШЁШ§ ШҜШұШ§ЫҢЩҲ VCP Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ЩҶЫҢШҜ
Ъ©ШҜ:
USBD_Init(&USB_OTG_dev, USB_OTG_FS_CORE_ID, &USR_desc, &USBD_CDC_cb, &USR_cb);
put_char
ШӘШ§ШЁШ№ ШІЫҢШұ ЫҢЪ© Ъ©Ш§ШұШ§Ъ©ШӘШұ ШұШ§ Ш§ШұШіШ§Щ„ Щ…ЫҢ Ъ©ЩҶШҜ.
ШЁЩҮ Ш№ЩҶЩҲШ§ЩҶ Щ…Ш«Ш§Щ„:
Ъ©ШҜ:
uint8_t chr = 'R';
VCP_put_char(chr);
------------------
VCP_put_char('G');
------------------
uint8_t *chr = 'B';
VCP_put_char(*chr);
put_char
ШӘШ§ШЁШ№ ШІЫҢШұ ЫҢЪ© Ъ©Ш§ШұШ§Ъ©ШӘШұ ШұШ§ Щ…ЫҢ ЪҜЫҢШұШҜ Щ…ЫҢ Ъ©ЩҶШҜ.
ШЁЩҮ Ш№ЩҶЩҲШ§ЩҶ Щ…Ш«Ш§Щ„:
Ъ©ШҜ:
uint8_t chr;
VCP_get_char(&chr);
------------------
uint8_t *chr;
VCP_get_char(chr);
send_str
ШӘШ§ШЁШ№ ШІЫҢШұ ШұШҙШӘЩҮ ШұШ§ Щ…ЫҢ ЩҒШұШіШӘШҜ
ШЁЩҮ Ш№ЩҶЩҲШ§ЩҶ Щ…Ш«Ш§Щ„:
Ъ©ШҜ:
uint8_t str[]="Robotics Engineering";
VCP_send_str(str);
------------------
VCP_send_str("CooCox CoIDE");
get_string
ШӘШ§ШЁШ№ ШІЫҢШұ ЫҢЪ© ШұШҙШӘЩҮ ШұШ§ Щ…ЫҢ Ш®ЩҲШ§ЩҶШҜ.
Ъ©ШҜ:
VCP_get_string(str);
ШЁЩҮ Ш№ЩҶЩҲШ§ЩҶ Щ…Ш«Ш§Щ„:
Ъ©ШҜ:
uint8_t Name[20];
VCP_get_string(Name);
ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ Ш¬ЩҮШӘ Ъ©Ш§Шұ ЩҫЩҲШұШӘ USB ШҜШұ ШҜШіШӘЩҮ Device ШҜШұ Ш®ЩҲШҙЩҮ ЫҢ CDC ШЁШ§ ШҜШұШ§ЫҢЩҲ VCP
VCP ШЁШұЪҜШұЩҒШӘЩҮ Ш§ШІ Ш№ШЁШ§ШұШӘ Virtual COM Port Ш§ШіШӘ. ЫҢШ№ЩҶЫҢ ЩҲЫҢЩҶШҜЩҲШІ ЩҒЪ©Шұ Щ…ЫҢ Ъ©ЩҶШҜ Ъ©ЩҮ ЩҫЩҲШұШӘ USB Ш§Шҙ ШӯШ°ЩҒ ШҙШҜЩҮ Ш§ШіШӘ ЩҲ ЩҫЩҲШұШӘ COM ШЁЩҮ ШіЫҢШіШӘЩ… Ш§Ш¶Ш§ЩҒЩҮ ШҙШҜЩҮ Ш§ШіШӘ.
ШҙЩ…Ш§ Щ…ЫҢ ШӘЩҲШ§ЩҶЫҢШҜ ШЁШұЩҶШ§Щ…ЩҮ ЩҮШ§ЫҢ ШЁЩҶЩҲЫҢШіЫҢШҜ (ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Ъ©ШӘШ§ШЁ Ш®Ш§ЩҶЩҮ ЩҮШ§ЫҢ ШҜЫҢЪҜШұ ЫҢШ§ ШЁШ§ Ш§ШіШӘЩҒШ§ШҜЩҮ Ш§ШІ Ш§ШіЩ…ШЁЩ„ЫҢ) Ъ©ЩҮ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ ЩҒЪ©Шұ Ъ©ЩҶШҜ ЩҫЩҲШұШӘ Щ…ЩҲШ§ШІЫҢ ШҜШ§ШұШҜ ЫҢШ§ ЩҒЪ©Шұ Ъ©ЩҶШҜ USB ШЁЩҮ Щ…ЩҲШі ЩҲШөЩ„ ШҙШҜЩҮ Ш§ШіШӘ ЩҲ ...
ЪҶЩҲЩҶ Ш§ЫҢЩҶ Ш¬Ш§ ШЁЩҮ ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ ЩҲ ШІШЁШ§ЩҶ ЩҮШ§ЫҢ ЪҜЩҲЩҶШ§ЪҜЩҲЩҶ ШўЩҶ ШЁШіШӘЪҜЫҢ ШҜШ§ШұШҜ ЩҶЩ…ЫҢ ШӘЩҲШ§ЩҶЩ… ШӘЩ…Ш§Щ… ШұЩҲШҙ ЩҮШ§ЫҢШҙ ШұШ§ ШЁЪҜЩҲЫҢЩ…. Щ…Ш№Щ…ЩҲЩ„Ш§ Ш§ЫҢЩҶ Ш¬ЩҲШұ Ъ©Ш§Шұ ЩҮШ§ (ШЁШұЩҶШ§Щ…ЩҮ ШЁШ§ ШіШұШ№ШӘ Ш§Ш¬ШұШ§ЫҢ ЩҫШ§ЫҢЫҢЩҶ) ШұШ§ ШЁШ§ ШІШЁШ§ЩҶ ЩҫШ§ЫҢШӘЩҲЩҶ Щ…ЫҢ ЩҶЩҲЫҢШіЩҶШҜ. ШҜШұ Ш§ШҜШ§Щ…ЩҮ ЩҒЩӮШ· ШЁЩҮ ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ Щ…ШӘЩ„ШЁ Ш§ШҙШ§ШұЩҮ Щ…ЫҢ Ъ©ЩҶЩ…
Ъ©ШҜ:
s6 = serial('COM6','BaudRate',9600,'DataBits',8,'Timeout',5,'Terminator' ,' ');
fopen(s6);
fprintf(s6,'Robotics');
fscanf(s6)
fclose(s6);
Ш®Ш· Ш§ЩҲЩ„ ШӘШ№ШұЫҢЩҒ Щ…ЫҢ Ъ©ЩҶШҜ Ъ©ЩҮ ШіШ®ШӘ Ш§ЩҒШІШ§Шұ ЪҶЫҢШіШӘ. ШӘЩҶШёЫҢЩ…Ш§ШӘШҙ ШҜШұ Ъ©ЩҶШӘШұЩ„ ЩҫЩҶЩ„ ЩӮШіЩ…ШӘ ШҜЫҢЩҲШ§ЫҢШі Щ…ЩҶЫҢШ¬Шұ Щ…ЩҲШ¬ЩҲШҜ Ш§ШіШӘ.
Ш®Ш· ШҜЩҲЩ… ЩҫЩҲШұШӘ ШұШ§ ШЁШ§ШІ Щ…ЫҢ Ъ©ЩҶШҜ.
ШӯШ· ШіЩҲЩ… Ъ©Щ„Щ…ЩҮ ЫҢ Robotics Щ…ЫҢ Ъ©ЩҶШҜ
Ш®Ш· ЪҶЩҮШ§ШұЩ… ЩҫЩҲШұШӘ ШұШ§ Щ…ЫҢ Ш®ЩҲШ§ЩҶШҜ.
Ш®Ш· ШўШ®Шұ ЩҫЩҲШұШӘ ШұШ§ Щ…ЫҢ ШЁЩҶШҜШҜ.
ШҜШұ ШЁШұЩҶШ§Щ…ЩҮ ЩҶЩҲЫҢШіЫҢ Щ…ШӘЩ„ШЁ ШЁШіШӘЩҶ ЩҫЩҲШұШӘ Ш¶ШұЩҲШұЫҢ Ш§ШіШӘ. Ш§ЪҜШұ ШЁШұЩҶШ§Щ…ЩҮ ЫҢШӘШ§ЩҶ ЩҲШіШ·Шҙ Ш®Ш·Ш§ ШҜШ§ШҜ ШЁЩҮ ШӘЩҶЩҮШ§ЫҢЫҢ Ш§ЫҢЩҶ ШҜШіШӘЩҲШұ ШұШ§ Ш§Ш¬ШұШ§ Ъ©ЩҶЫҢШҜ ШӘШ§ ШЁШӘЩҲШ§ЩҶЫҢШҜ Щ…Ш¬ШҜШҜШ§ Ш§ШІ Ш§ЫҢЩҶ ШҜШіШӘЩҲШұШ§ШӘ ЩҒЩҲЩӮ Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ЩҶЫҢШҜ.
ШҜШұ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ Щ…ЩҶ ЩҫЩҲШұШӘ COM6 ЩҶШ§Щ…ЫҢШҜЩҮ ШҙШҜ. ШҙЩ…Ш§ ШЁШ§ЫҢШҜ ШҙЩ…Ш§ШұЩҮ ЩҫЩҲШұШӘ ШұШ§ ШҜШұ Ъ©ЩҶШӘШұЩ„ ЩҫЩҶЩ„ ЩӮШіЩ…ШӘ ШҜЫҢЩҲШ§ЫҢШі Щ…ЩҶЫҢШ¬Шұ ШЁШЁЫҢЩҶЫҢШҜ ЩҲ Ш§ШІ ШўЩҶ Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ЩҶЫҢШҜ.
Щ…Ш«Ш§Щ„
ШЁШұЩҶШ§Щ…ЩҮ Ш§ЫҢ ШЁЩҶЩҲЫҢШіЫҢШҜ Ъ©ЩҮ ШЁШ§ Ш§ШұШіШ§Щ„ Ш§ЩҲЩ„ ШӯШұЩҒ ЩҮШұ ШұЩҶЪҜ (ШЁЩҮ ШҜШұ ШӯШұЩҒ ШҜШұШҙШӘ) Ш§ШІ Ш·ШұЫҢЩӮ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұШҢ Щ…ЩӮШҜШ§Шұ LED Щ…ШӘЩҶШ§ШёШұ ШўЩҶ ШұЩҲЫҢ ШЁШұШҜ ШӘШәЫҢЫҢШұ ЩҲШ¶Ш№ЫҢШӘ ШҜЩҮШҜ.
[PHP]
#define HSE_VALUE ((uint32_t)8000000) // STM32 discovery uses a 8Mhz external crystal
#include "stm32f4xx.h"
#include "stm32f4xx_conf.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_exti.h"
#include "usbd_cdc_core.h"
#include "usbd_usr.h"
#include "usbd_desc.h"
#include "usbd_cdc_vcp.h"
#include "usb_dcd_int.h"
//The USB data must be 4 byte aligned if DMA is enabled. This macro handles the alignment, if necessary.
__ALIGN_BEGIN USB_OTG_CORE_HANDLE USB_OTG_dev __ALIGN_END;
// The conditional "extern" ensures the weak declarations from startup_stm32f4xx.c are overridden.
#ifdef __cplusplus
extern "C" {
#endif
void OTG_FS_IRQHandler(void)
{
USBD_OTG_ISR_Handler (&USB_OTG_dev);
}
void OTG_FS_WKUP_IRQHandler(void)
{
if(USB_OTG_dev.cfg.low_power)
{
*(uint32_t *)(0xE000ED10) &= 0xFFFFFFF9 ;
SystemInit();
USB_OTG_UngateClock(&USB_OTG_dev);
}
EXTI_ClearITPendingBit(EXTI_Line18);
}
#ifdef __cplusplus
}
#endif
int main(void)
{
uint8_t charac;
SystemInit(); // Set up the system clocks
//SysTick_Config(SystemCoreClock / 1000); // Setup SysTick
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE);
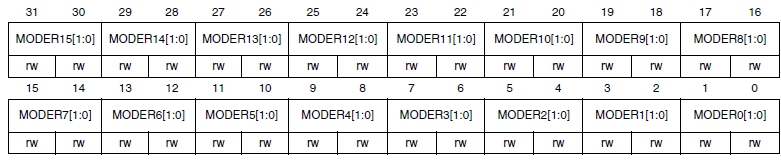
GPIOD->MODER=0x55000000;
USBD_Init(&USB_OTG_dev, USB_OTG_FS_CORE_ID, &USR_desc, &USBD_CDC_cb, &USR_cb); // Setup USB
while (1)
{
VCP_get_char(&charac);
VCP_put_char(charac);
switch(charac)
{
case 'G':
GPIO_ToggleBits(GPIOD, GPIO_Pin_12);
break;
case 'O':
GPIO_ToggleBits(GPIOD, GPIO_Pin_13);
break;
case 'R':
GPIO_ToggleBits(GPIOD, GPIO_Pin_14);
break;
case 'B':
GPIO_ToggleBits(GPIOD, GPIO_Pin_15);
}
}
return 0;
}
[/PHP]
ШӘЩ…ШұЫҢЩҶ
ШҜШұ ШӘЩ…ШұЫҢЩҶШ§ШӘ ШІЫҢШұ Ш№Щ„Ш§ЩҲЩҮ ШЁШұ ШЁШұЩҶШ§Щ…ЩҮ Щ…ЫҢЪ©ШұЩҲ ШҢ ШЁШұЩҶШ§Щ…ЩҮ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ ШұШ§ ЩҶЫҢШІ ШЁЩҶЩҲЫҢШіЫҢШҜ:
1- ШЁШұЩҶШ§Щ…ЩҮ Ш§ЫҢ ШЁЩҶЩҲЫҢЫҢШҜ Ъ©ЩҮ ШұШҙШӘЩҮ "Robotics Engineering" ШұШ§ ШЁЩҮ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ Ш§ШұШіШ§Щ„ Ъ©ЩҶШҜ. ШіЩҫШі Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ ШўЩҶ ШұШ§ Щ…Ш¬ШҜШҜ ШЁЩҮ Щ…ЫҢЪ©ШұЩҲ Ш§ШұШіШ§Щ„ Ъ©ЩҶШҜШҢ ШҜШұ ШөЩҲШұШӘЫҢ Ъ©ЩҮ Ш№ШЁШ§ШұШӘ ШҜШұШіШӘ Ш§ШұШіШ§Щ„ ШҙШҜЩҮ ШЁЩҲШҜ ЪҶШұШ§Шә ШіШЁШІ ШұЩҲШҙЩҶ ШҙЩҲШҜ ЩҲ ШҜШұ ШөЩҲШұШӘЫҢ Ъ©ЩҮ Ш§ШҙШӘШЁШ§ЩҮ ШҙШҜЩҮ ШЁЩҲШҜ ЪҶШұШ§Шә ЩӮШұЩ…ШІ ШұЩҲШҙЩҶ ШҙЩҲШҜ ЩҲ ШҜЩҲШЁШ§ШұЩҮ ШұШҙШӘЩҮ Ш§ШұШіШ§Щ„ ШҙЩҲШҜ ЩҲ Ш§ЫҢЩҶ Ъ©Ш§Шұ Ш§ШҜШ§Щ…ЩҮ ЩҫЫҢШҜШ§ Ъ©ЩҶШҜ ШӘШ§ ШұШҙШӘЩҮ ШҜШұШіШӘ Ш§ШұШіШ§Щ„ ШҙЩҲШҜ.
2- ШЁШұЩҶШ§Щ…ЩҮ ШҙЩ…Ш§ШұЩҮ 1 ШұШ§ Ш·ЩҲШұЫҢ ШЁЩҶЩҲЫҢШіЫҢШҜ Ъ©ЩҮ ШӯШұЩҒ ШЁЩҮ ШӯШұЩҒ Ш§ШұШіШ§Щ„ ЩҲ ШӘШ§ЫҢЫҢШҜ ШҙЩҲШҜ. ШЁШұШ§ЫҢ ШӘШ§ЫҢЫҢШҜ ШӯШұЩҒ ШЁЩҮ ШӯШұЩҒ Щ…ЫҢ ШӘЩҲШ§ЩҶЫҢШҜ Ш§ШІ Ъ©Ш§ШұЪ©ШӘШұ ЩҮШ§ЫҢ - ЩҲ = ШЁШұШ§ЫҢ Ш§Ш·Щ…ЫҢЩҶШ§ЩҶ Ш§ШІ ШөШӯШӘ Ш§ШұШіШ§Щ„ Ш§ШіШӘЩҒШ§ШҜЩҮ Ъ©ЩҶЫҢШҜ.
3- ШЁШұЩҶШ§Щ…ЩҮ Ш§ЫҢ ШЁЩҶЩҲЫҢШіЫҢШҜ Ъ©ЩҮ ШЁШ§ Ш§ШұШіШ§Щ„ ШұШҙШӘЩҮ "Traffic Lights" ШЁШұШҜ Ш№Щ…Щ„ ЪҶШұШ§Шә ШұШ§ЩҮЩҶЩ…Ш§ЫҢЫҢ Ш§Ш¬ШұШ§ ШҜЩҮШҜ. ШҜШұ ШөЩҲШұШӘ Ш§ШұШіШ§Щ„ ШұШҙШӘЩҮ "Flashing Red" ЪҶШұШ§Шә ЩӮШұЩ…ШІ ЪҶШҙЩ…Ъ© ШІЩҶШҢ ШҜШұ ШөЩҲШұШӘ Ш§ШұШіШ§Щ„ ШұШҙШӘЩҮ "Flashing Yellow" ЪҶШұШ§Шә ЩӮШұЩ…ШІ ЪҶШҙЩ…Ъ© ШІЩҶ ЩҲ ШҜШұ ШөЩҲШұШӘ Ш§ШұШіШ§Щ„ "Off" ЩҮЩ…ЩҮ ЫҢ LED ЩҮШ§ Ш®Ш§Щ…ЩҲШҙ ШҙЩҲЩҶШҜ.
4- ШЁШұЩҶШ§Щ…ЩҮ ШЁШ§ШӘ ШұШ§ ШЁЩҶЩҲЫҢШіЫҢШҜ. ШҜШұ Ш§ЫҢЩҶ ШЁШұЩҶШ§Щ…ЩҮ ШЁШұШҜ ШЁЩҮ ШұШҙШӘЩҮ ЩҮШ§ Ш¬ЩҲШ§ШЁ Щ…ЫҢ ШҜЩҮШҜ. Щ…Ш«Щ„Ш§ Ш§ЪҜШұ "Salam" ШҜШұ ЫҢШ§ЩҒШӘ Ъ©ШұШҜ ШұШҙШӘЩҮ ЫҢ "Salam Alaykom" ШұШ§ Ш§ШұШіШ§Щ„ Ъ©ЩҶШҜ ЩҲ ЫҢШ§ Щ…Ш«Щ„Ш§ ЩҲЩӮШӘЫҢ "smkdgjnspkrjg" ШҜШұ ЫҢШ§ЩҒШӘ Ъ©ЩҶШҜ Ш№ШЁШ§ШұШӘ "I do not know" ШұШ§ Ш§ШұШіШ§Щ„ Ъ©ЩҶШҜ ЩҲ ...
5- ШЁШұЩҶШ§Щ…ЩҮ ШҙШЁЫҢЩҮ ШіШ§ШІ ШұШЁШ§ШӘ ШӘШ№ЩӮЫҢШЁ Ш®Ш· ШЁШ§ ЩҫЩҶШ¬ ШіЩҶШіЩҲШұ ШұШ§ ШЁЩҶЩҲЫҢШіЫҢШҜ. ШҜШұ Ш§ЫҢЩҶ ШҙШЁЫҢЩҮ ШіШ§ШІ ШҜШ§ШҜЩҮ ЩҮШ§ (Ш§Ш·Щ„Ш§Ш№Ш§ШӘ ШіЩҶШіЩҲШұ) Ш§Шұ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ Ш§ШұШіШ§Щ„ Щ…ЫҢ ШҙЩҲЩҶШҜ ЩҲ ШұШЁШ§ШӘ ЩҫШі Ш§ШІ ШӘШӯЫҢЩ„ЫҢ ШіШұШ№ШӘ ЩҮШұ Щ…ЩҲШӘЩҲШұ ШұШ§ ШЁЩҮ Ъ©Ш§Щ…ЩҫЫҢЩҲШӘШұ Ш§ШұШіШ§Щ„ Щ…ЫҢ Ъ©ЩҶШҜ.





 ЩҫШ§ШіШ® ШЁШ§ ЩҶЩӮЩ„ ЩӮЩҲЩ„
ЩҫШ§ШіШ® ШЁШ§ ЩҶЩӮЩ„ ЩӮЩҲЩ„